Unreliable Failure Detectors for Reliable Distributed Systems
TL;DR
- Consensus 和 Atomic broadcast是 equivalent的,能解 consensus的演算法,就可以解 atomic broadcast
- 要在 asynchronous的環境解決 consensus,至少需要 weak accuracy的failure detector
- 要在 asynchronous環境解決 BGP問題,至少需要strong accuracy的failure detector
- 因為FLP Theorem已經證明了無解,所以以上現實中不存在weak accuracy failure detector和strong accuracy failure detector
- 現實系統還是能用asynchronous架構,因為我們不需要weak accuracy永遠滿足,只需要足夠長的時間滿足,就可以應用此理論來設計系統
Note 因為這篇論文內容非常的多,這篇只會放名詞定義跟結論,重要的證明會放在 Unreliable Failure Detectors for Reliable Distributed Systems (證明篇)
Introduction
藉由引入failure detector和failure pattern,我們就可以說某個asynchoronous algorithm能不能用此failure detector和failure pattern來解決某個分散式系統問題。反過來,我們也可以說需要多強的failure detector才可以在某個failure pattern條件下,解決某個分散式系統問題。
對應標題的unreliable,failure detector的結果可能會出錯,即使failure detector的結果出錯,也不應該影響此演算法的行為。例如解決consensus的演算法,即使所有的detector都誤認為process fail了,也不應該影響參與決策並且達成共識。
Failure Detector
Detector擁有兩個properties:
- Completeness
- Accuracy
Completeness
Strong Completeness: Eventaully 每個 faulty process,都存在"每個"detector的error list裡面。
Weak Completeness: Eventaully 至��少有一個detector 辨識出所有的faulty processs。
單純只看 completeness是沒有意義的,假設某個detector把所有的process,不管是correct 或是 faulty都送進 error list裡面,它也滿足 strong completeness,但此detector是沒有用處的。
Accuracy
Accuracy 分成四個屬性:
Strong Accuracy: 所有fault process在crash之前,沒有被suspect。
Weak Accuracy: 至少有一個correct process在crash之前,從來沒被誤判成faulty process。
Eventual Strong Accuracy: Eventually (在某個時間點 以後),所有的correct process都沒被誤判成faulty process。
Eventual Weak Accuracy: Eventually (在某個時間點 以後),至少有一個correct process 沒被誤判成faulty process。
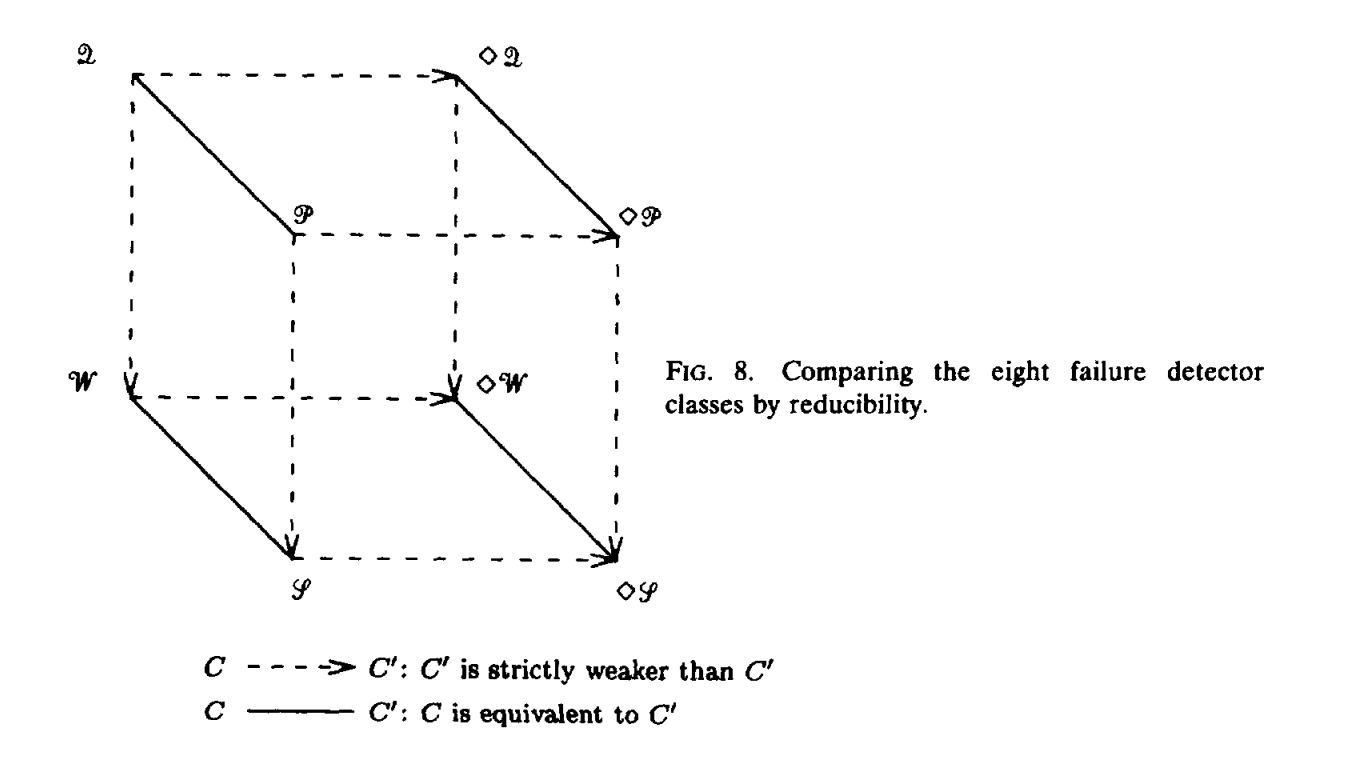
Failure Detector Classes
Completeness和Accuracy總共有8種組合 (2x4),但我們可以證明Weak Completeness detector 可以reduce成 Strong Completeness dector,所以任合需要Strong Completeness dector的演算法,都可以使用Weak Completeness detector來處理,因此實際上只有4種組合。
Reliable Broadcast
我們定義 Reliable Broadcast 保證:
- 所有的correct process 都deliver 同樣的message set
- 所有correct process的message都delivered
- Spurious message不會被deliver
Reliable Broadcast提供兩個operation:R-broadcast和R-deliver。
Solving Consesus using Unreliable Failure Detectors
- 如果failure detector擁有weak accuracy,要解決Consensus問題,可以允許任何數目的node failure
- 如果failure detector擁有eventual weak accuracy,至少需要majority的correct process才能處理consensus
- eventual strong detector也無法在沒有majority的情況下解決consensus
Atomic Broadcast
定義
- Total order: 所有的process都有同樣順序的deliver順序
Conclusion
- Atomic Broadcast跟consensus等價
- 可以solve consensus的演算法就可以solve Atomic Broadcast
Comparing Failure Detector Classes
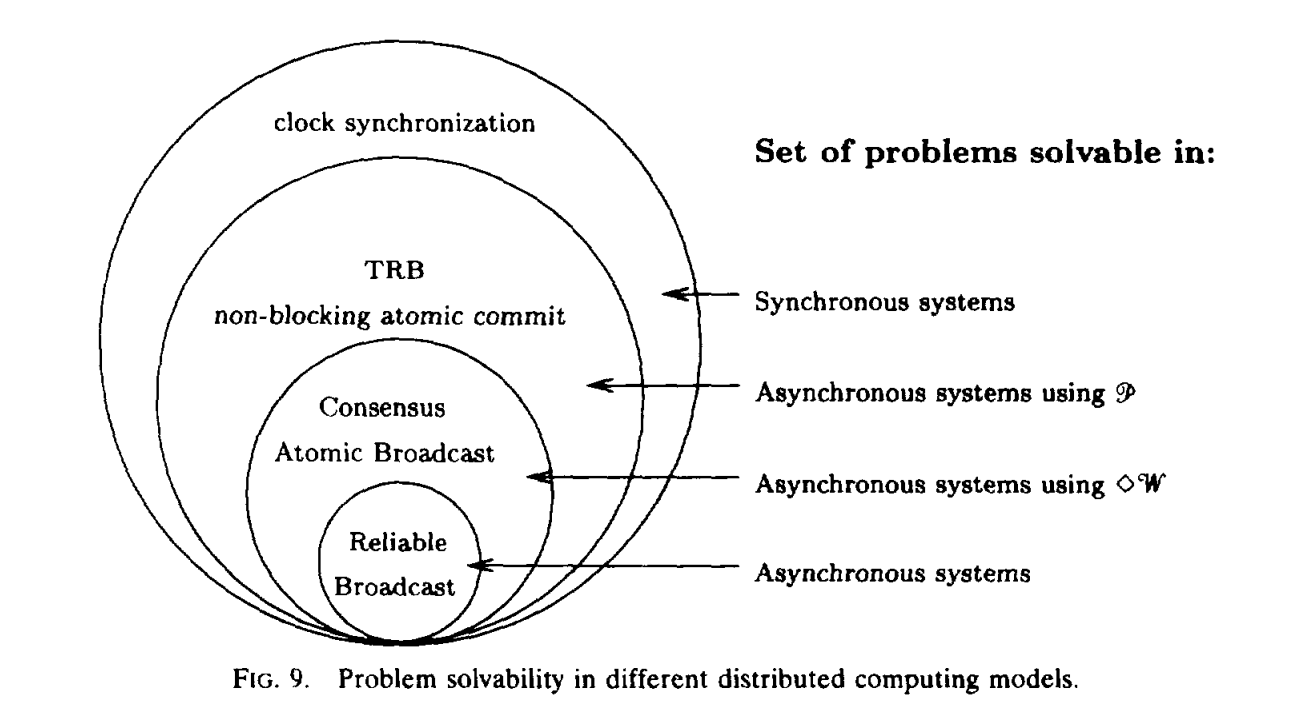
Conslusion
- 拜占庭問題只能用strong accurcy來解(在asynchronous system)
- Clock synchronization只能用synchronous system來解