Unreliable Failure Detectors for Reliable Distributed Systems (證明篇)
Weak Completeness to Strong Completeness
演算法
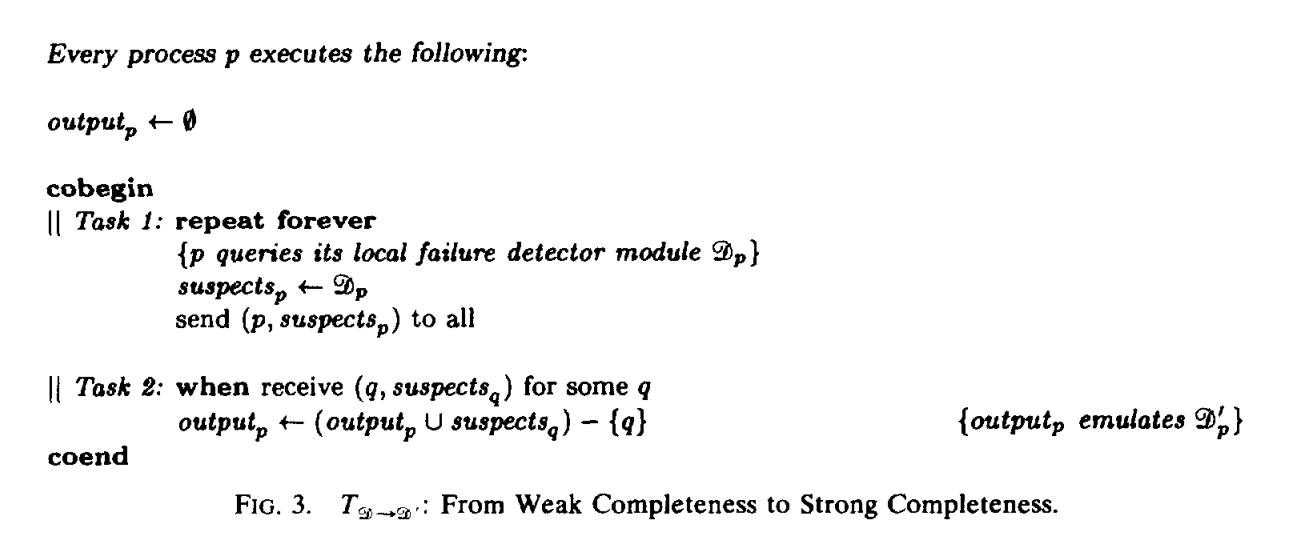
lemma 1: Transforming weak completeness into strong completeness
根據 weak completeness的定義,至少有一個process 知道所有的faulty process。根據演算法, 會不斷的broadcast他自身的結果,在某個時間以後所有的correct process都會接收到的訊息,更新自身的並且所有的faulty process都crash,所以correct process不會在收到faulty process��的訊息,也不會把它們從output中移除,因此對每一個 > ,所有的correct process都會output所有的faulty process,滿足strong completeness的定義。
lemma 2: Perserving perpetual accuracy
定義: 在 之前沒有被suspect,在transform後也一樣
證明: 在某個時間點以前,沒有任何process suspect ,故滿足lemma 2。
lemma 3: Preserving eventual accuracy
定義: 在之後沒有被suspect,在transform後也一樣
證明: 在某個時間點以後,faulty process都crash,而所有的correct process 的訊息都被其他correct process接受過,並且把從自身的output中移除。
證明
從lemma 1可以把weak completeness transform成strong completeness。從lemma 2可以知道��,如果是strong accuracy 或是 weak accuracy,在tranform以後還是滿足accuracy。從lemma 3 可以知道,如果detector原本是eventual strong或eventual weak在transform以後還是滿足accuracy。
從以上可以知道,我們可以把相同accuracy的weak completeness detector用來處理strong completeness detector的問題。
Solving Consensus using weak accuracy ans strong completeness failure detector
演算法
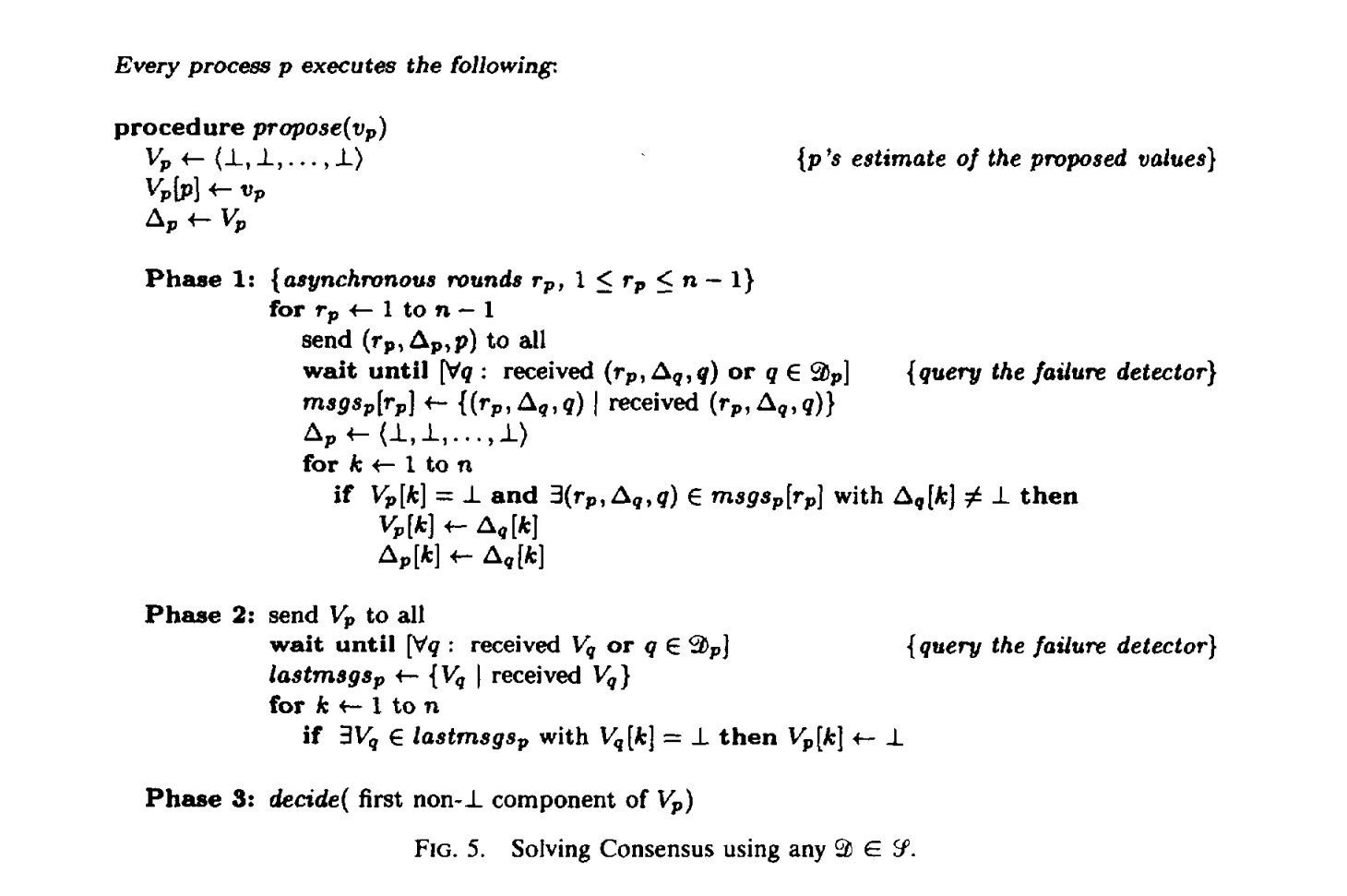
lemma 1: 對每個phase的任何 and ,的output set , is either or none
證明: 從演算法明顯可見。
lemma 2: 所有的correct process都可以reach phase 3
證明: 只有phase 1和phase 2的 會block process,所以我們要證明這兩個地方都不會block。
因為是strong completeness,所有的faulty process最後都會出現在failure list中,所以correct process不會因為等待faulty process的訊息而被block,所以每個correct process都可以reach phase 3。
因為是weak accuracy,系統中存在一個correct process ,從來沒有被suspect過。
lemma 3
lemma: 在phase 1的每一個round, ,所有的process 都從收到,也就是說在 證明: 因為 執行n-1 round,且沒被suspect,所以會等待的訊息,並把放入中。
lemma 4: 對於phase 1的每個process ,在phase 1結束的時候, 被 包含
證明: 分成兩個部份來證明。
1: ,因此在 r+1 round的時候,, relays 的訊息,並把設成,從lemma 3可以知道,在結束的時候,會收到,並且把設定成。
2: ,第一次收到的訊息,因為每個process最多relays 的訊息一次,因此也已經收到過的訊息,並且把設定成。
有以上兩點可知,被包含。
lemma 5: 對於每個phase 2的 process ,在phase 2結束的時候,
證明: 分成兩種可能來討論
1: 。跟據lemma 4,在phase 1結束的時候,如果被包含,如果,對其他來說,。
2: 。因為從來沒有被誤判為faulty process,所以在phase 2它的訊息一定會被收到。根據演算法,收到訊息的process,都會把 更新成,故 。
從以上兩種情況來看,對每個來說,,故,故得證。
lemma 6: 每個process都decide同樣的值
證明: 從lemma 5可以得到在phase 2結束,每個process的都一樣,且它們會挑選第一個不是的值,因此也會挑出一樣的值來decide。
lemma 7: 每個phase 2的,在phase 2結束的時候,
證明: 從lemma 4可以知道在phase 1結束的時候,,而在phase 2的時候,也不會有任何一個 send 的訊息,所以得證。
Theorem: 可以用Weak accuracy解決 consensus
證明: 滿足consensus的三個條件: validity, agreement and uniform integrity。
根據 lemma 6每個proccess都decide同樣的值,所以滿足agreement。根據lemma 2,每個correct process都會進入phase 3,而根據lemma 7,至少有一個不是的值可以用,所以這個演算法會結束,滿足termination。承上,這個非的值是由某個process所propose,所以滿足validity,因為三個條件都滿足,故得證。
Solving Consensus using eventual weak accuracy ans strong completeness failure detector
演算法
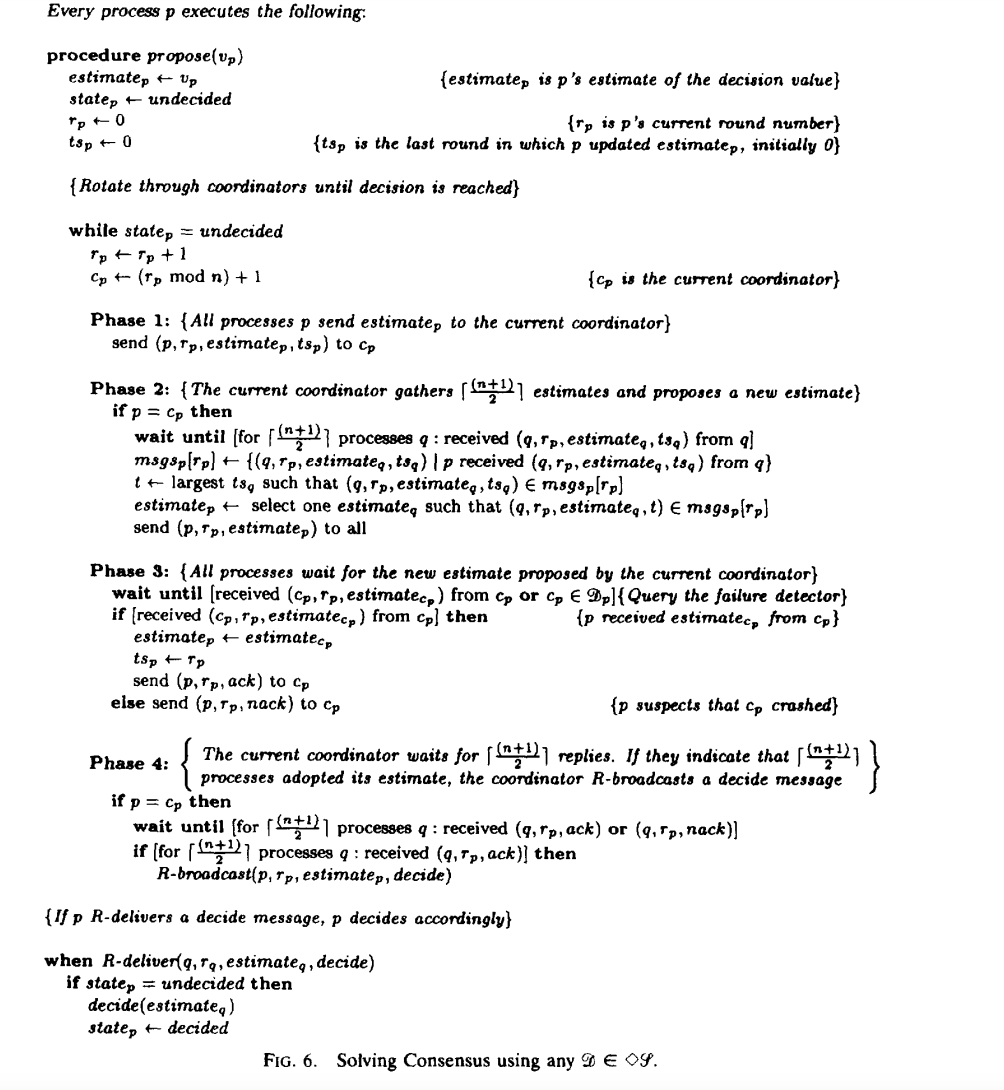
lemma 1: 每個process都decide同樣的值
證明: 如果在phase 4要decide,代表phase 3的時候coordinator 至少收到majority的ack,也代表在 phase 2的提出。我們假設 propose 的round為,嘗試證明對於 ,。
我們用induction來嘗試證明,對每個k都成立,我們定義round k的coordinator 為,也就是。
根據演算法,如果在phase 2的時候提出,代表它已經收到majority的estimate。那至少有一個在round r phase 3的時候送ack給 with ,而且也在round k phase 2的時候send estimate給 with 。
因為是nondecreasing,而且只有在收到coordinator的時候才會增加,因此,而且也可以輕鬆看出,我們定義是中最大的ts,因此存在關係式。
在round k phase 2的時候,會adopt ,也就是在 rount 提出的estimate。round t 的coordinator在phase 2的時候send to q,因為,根據induction,我們可以得出,故得證。
lemma 2: 每個correct process最終決定some value
證明: 分成兩種狀況討論
-
Some correct process decides。如果這些process要decide,他們會送,根據Reliable Broadcast,這些process一定會並。
-
No correct process decides,我們可以用
contradiction來證明不會發生。假設是有process blocks的最小round number��,因為majoriy會送訊息到coordinator 所以有兩種情況:
a. 最終收到majority的訊息並提出estimate,所以沒有block。 b. crash掉。
因為是strong completeness,所以correct process都知道掛掉不會被block,而因為是eventual accuracy,所以最終會有一個process 不會被suspect,並完成所有的phase並decide。
Theorem: 在majority存活的情況下,可以用eventual weak accuracy detector solve consensus
證明: 可從lemma 1與lemma 2得證。
Consensus cannot be solved using eventual strong accuracy detector in asynchronous system without majority
證明: 可以用contradiction來證明。如果可以solve consensus的話,我們可以把processes分成兩個set,一群在存活,另一群在存活,且各自提出不同的值,這樣會造成一種狀況是在的時候提出的值與提出的值不同,違反consensus,故跟假設矛盾。
Atomic Broadcast and Consensus
演算法
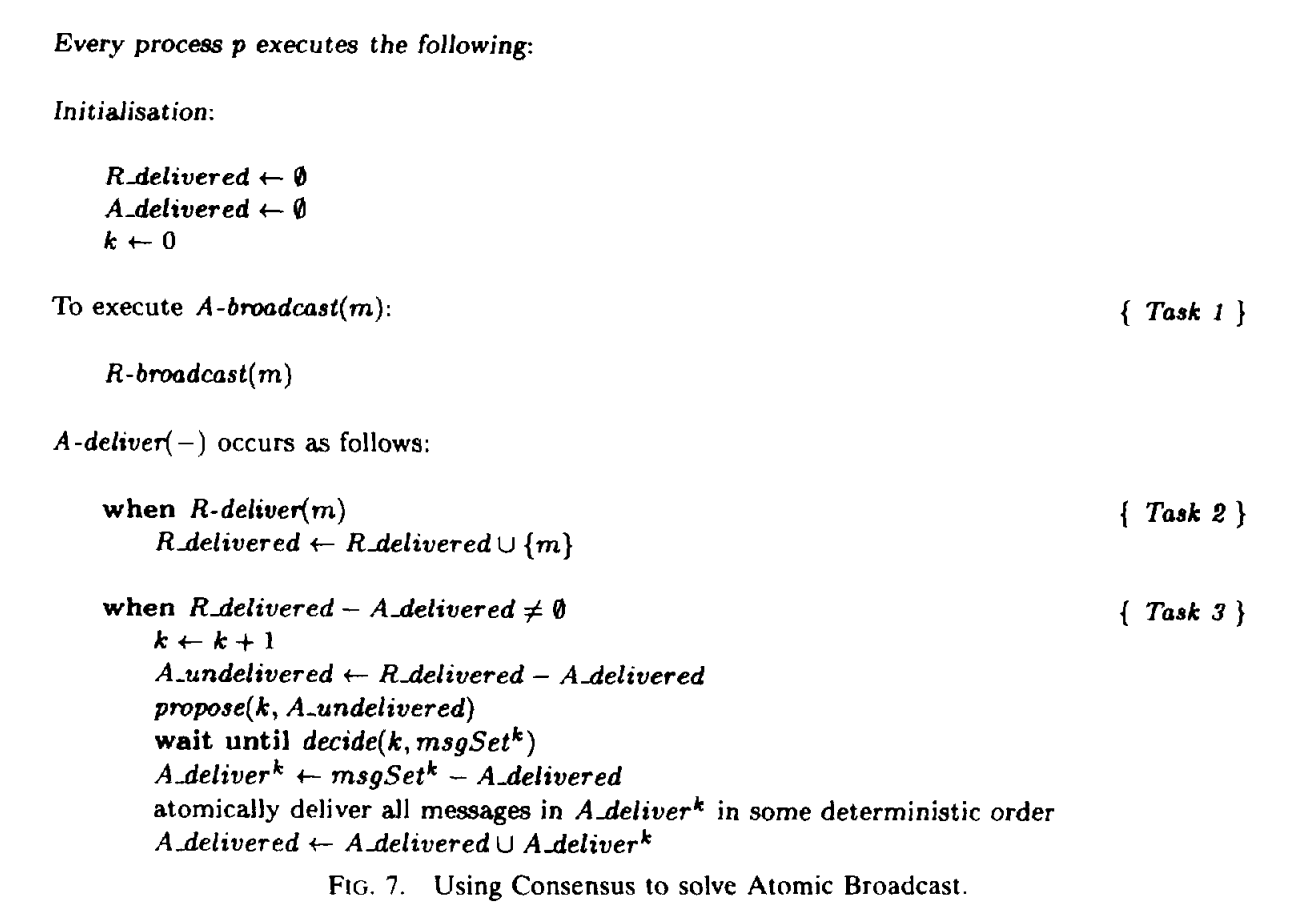
lemma 1: 對任兩個correct process 和和message ,如果屬於,則最終屬於
證明: 如果屬於,則在task 2 ,因為, 都是correct process,根據Reliable Broadcast的特性,最終 ,然後把加到。
lemma 2
定義
對任何兩個correct process , 和所有 :
- 如果執行,則最終執行
- 如果 A-delivers messages in ,則最終 A-delivers messages in ,且
證明
第一點
使用induction來證明。如果執行了,則根據lemma 1,最終會,並且根據間眼演算法, - 不等於空集合,所以最終會執行。
第二點
如果執行了,根據第一點所有的最終都執行了,而根據consensus,所有的process最終都。因為和一開始都是空的,而且根據consensus,,所以。
根據induction與上面相似證明,我們可以證明在任意k都成立,因此得證。
lemma 3: 演算法滿足 A-boradcast需要的agreement和total order
證明: 從lemma 2可以知道所有的correct process都以同樣順序send message。
lemma 4: 如果一個correct process ,則最終它
證明: 用contradiction來證明。如果 但沒有,代表永遠地停在裡。
根據lemma 2,在某個時間點以後,也就是時間點,correct process執行了。而在某個時間點,以後所有的fault process都crash。假設,correct process執行了,根據consensus與lemma 2,msgSet^k會且包含,故與假設矛盾。
lemma 5: 對任何一個message , only once iff m 之前被 by
證明: 根據演算法,如果 in ,它就在也不會被pick,故滿足only once。而根據演算法,如果執行,且在裡面,根據consensus,它必定已經被 by ,所以 。